Mecanum Omni Direction Wheel Robot car

Mecanum Omni wheel is a very powerful wheel technology which allows robot car make omni-directional movement( parallel shift to left and right).
In this project, we will show how to use Arduino to control an Osoyoo Brand Mecanum wheel robot car.

OSOYOO UNO board or MEGA2560 board fully compatible with Arduino UNO/Mega2560 x 1
OSOYOO V1.0 Wifi Shield x 1
Mecanum Wheels x 4 (2 left-wheels and 2 right-wheels)
GM37 Stepper Motor x 4
OSOYOO 4-channel motor driver board
Chassis x 1
HC02 Bluetooth Module
screws and jumper wires
18650 battery x 2
battery box x 1

Circuit Connection:
Motor wire connections:
| Motor | 4-channel motor driver |
| Front-Right wheel | Out 1(red)/Out 2(black) |
| Front-Left wheel | Out 3(red)/Out 4(black) |
| Rear-Right wheel | Out 5(red)/Out 6(black) |
| Rear-Left wheel | Out 7(red)/Out 8(black) |
Motor Driver to Arduino connection
| 4-channel motor driver | Arduino |
| front ENA | D5 |
| front ENB | D6 |
| IN1 | A0 |
| IN2 | A1 |
| IN3 | D7 |
| IN4 | D8 |
| IN5 | D11 |
| IN6 | D12 |
| IN7 | A2 |
| IN8 | A3 |
| Rear ENA | D9 |
| Rear ENB | D10 |
Bluetooth Module pin connections:
| Bluetooth module | Arduino |
| B_TX | UNO board D2 or MEGA2560 D19 |
| B_RX | UNO board D4 or MEGA2560 D18 |
Software:
Arduino Software download: http://osoyoo.com/driver/mecanum-omni-robot.zip
Mobile APP:
Go to your Google Play or Apple APP store and search APP name “OSOYOO imitation driving”, Download the APP as following and install it in your smart phone.
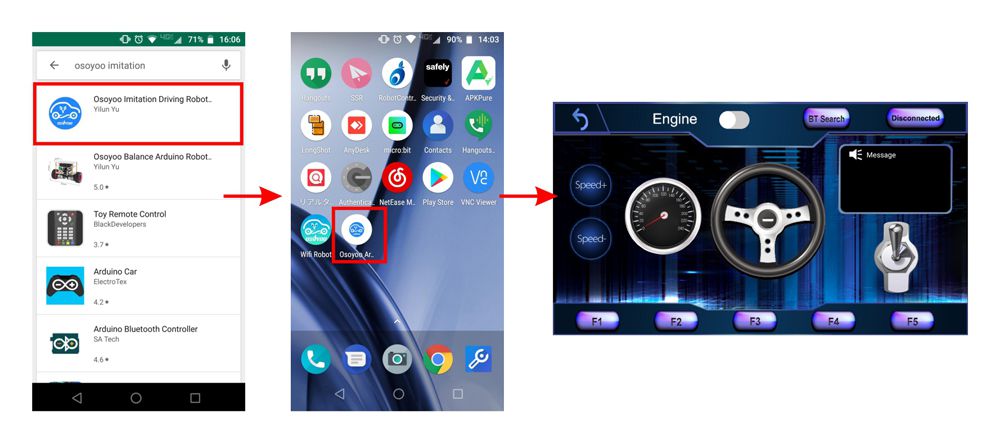
How to play:
Power on the robot, and open APP.
1)Click BT Search Button to connect APP to HC02 device
2)Click Engine Switch to start/stop the car
3)Click Speed +/- button to accelerate or reduce speed
4)Rotate the mobile phone to change direction(steering wheel will rotate while you are turning the phone).
5)click Gear button to change gear to Forward or Backward direction.
6)press F1 to Shift to left way, F5 to shift to right way, F3 to make clockwise rotation, F4 to make count clockwise rotation.
amber administrator
You must be logged in to post a comment
About the Author